杏彩体育·(中国)官方网站主营:激光打标机机、激光焊接机、激光切割机、激光清洗机等 咨询热线:18106121178

 全国服务热线:
全国服务热线:
18106121178
全国服务热线:
18106121178
很惊人啊,一共更新智能驾驶、通用语言能力、安全性能、娱乐功能等五大类的400项功能点,其中纯视觉智驾方案的升级换代是绝对的焦点。

所以在这次活动上,极越汽车CEO夏一平驾车全程使用点到点的领航辅助驾驶PPA,从上海嘉定开到了极越汽车杭州城西银泰体验店,亲自为极越01的纯视觉智驾方案站台。

不仅如此,极越还与平安保险联合推出了“智驾保”,这是全球首个高阶智能驾驶专属保障产品,也就是说,如果你在用极越01的高阶智驾PPA时候出事故了,所产生的责任费用将由保险公司进行赔付。别的先不说,这一点,值得所有车企学习。

从另外一个角度我们也可以看出,极越对自己的智驾系统是特别有信心的,那么这一次的OTA之中,它在智驾方面有哪些升级呢?
一种是激光雷达为基础的多传感器融合感知方案,这是目前包括蔚小理在内的大多数汽车品牌所采用的策略。

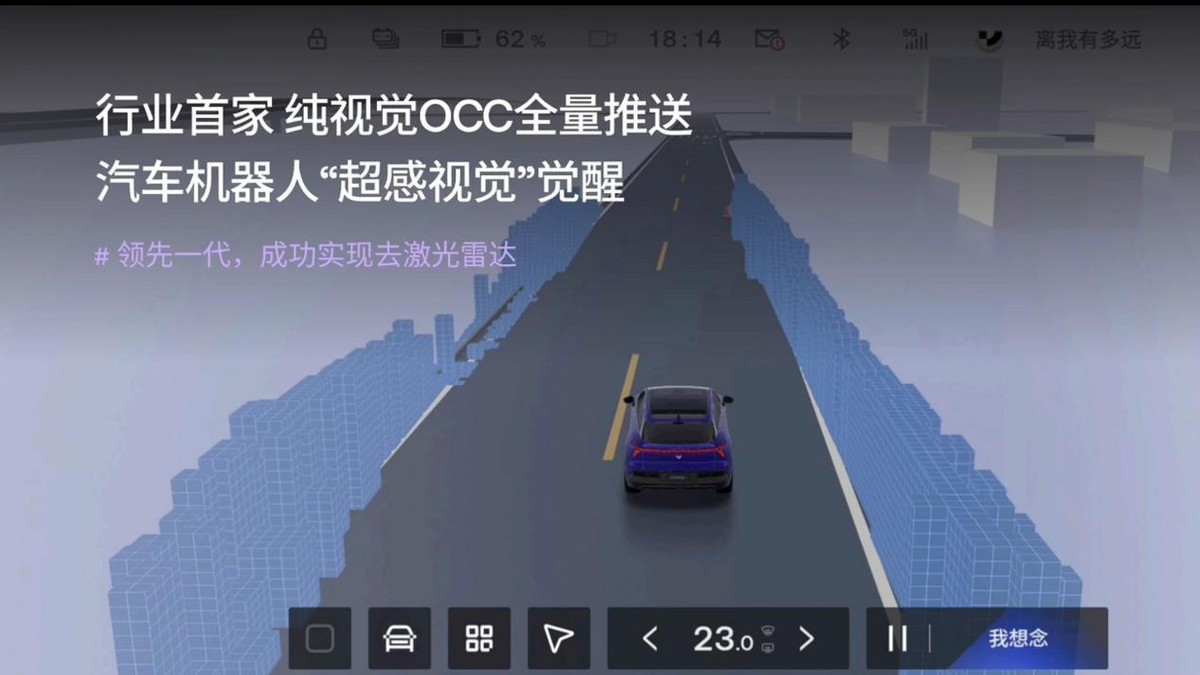
在这次更新之前,极越01在纯视觉方案上已经做出了不小的成绩,它的BEV+Transformer技术方案是国内唯一量产的纯视觉方案。
而这次更新,极越01融入了百度与极越联合开发的OCC占用网络技术,通过BEV+OCC+Transformer多任务统一网格,它可以大幅提升对异形障碍物识别和场景泛化的能力。
BEV(Birds-eye-view),中文翻译是鸟瞰图视角,它就像是一个转换器,核心作用是将2D信息作为输入,在加上测距的感知方式之后,最终转换为鸟瞰图视角下的3D环境。
在智能驾驶系统中,Transformer主要用于处理和理解车辆通过传感器收集到的关键环境信息,比如摄像头拍摄的图片、雷达和激光雷达检测到的数据等,比如一个即将穿越马路的行人,或者一个正在变道的车辆。
在此之前呢,BEV+Transformer的组合便在极越01这款车上量产并且实现了“纯视觉”的高阶智驾,但存在的提升空间在于:如何有效识别异形障碍物,如何拥有更高的场景泛化的能力。
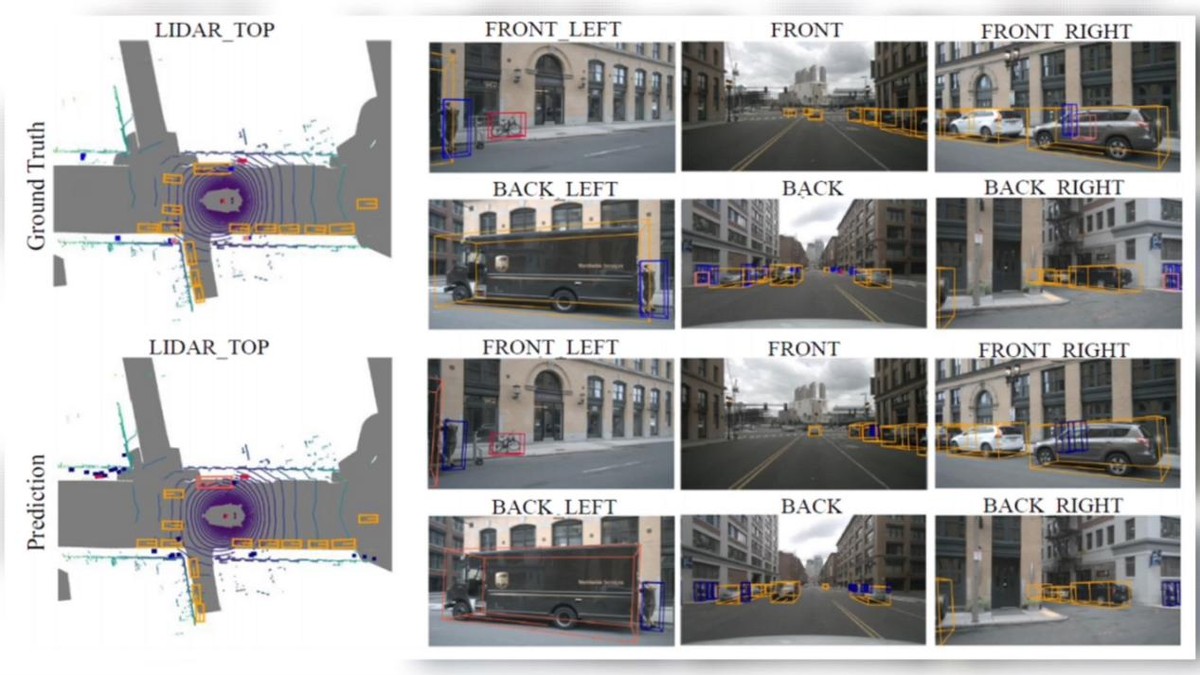
OCC(Occupancy Network)占用网络技术便是为解决这个难题而来的,它是一种基于深度学习的三维环境感知方法。
通过神经网络来预测一个空间位置是否被占据,它主要便是为了提高车辆对周围环境的理解能力,尤其是在处理复杂、多变的道路条件和障碍物识别时。
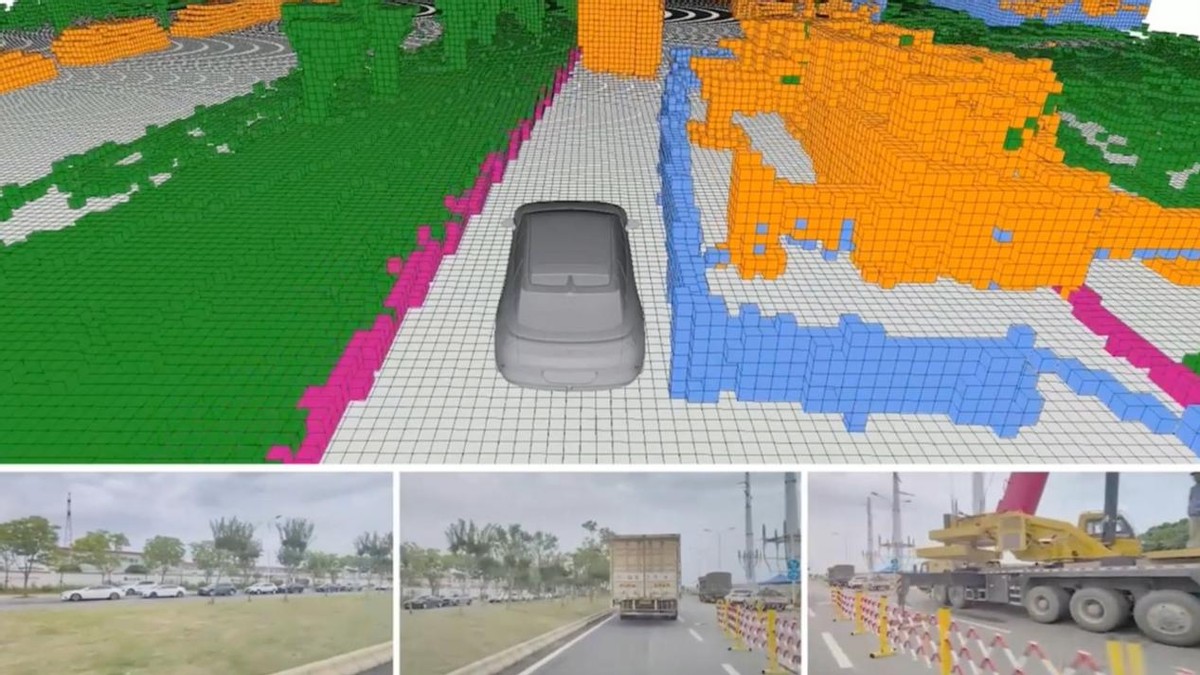
比如,在实际道路环境中,总会存在一些没有打标和训练过的障碍物,比如临时障碍物、施工区域、路边伸出的树枝、前方货车上掉下来的货物等。
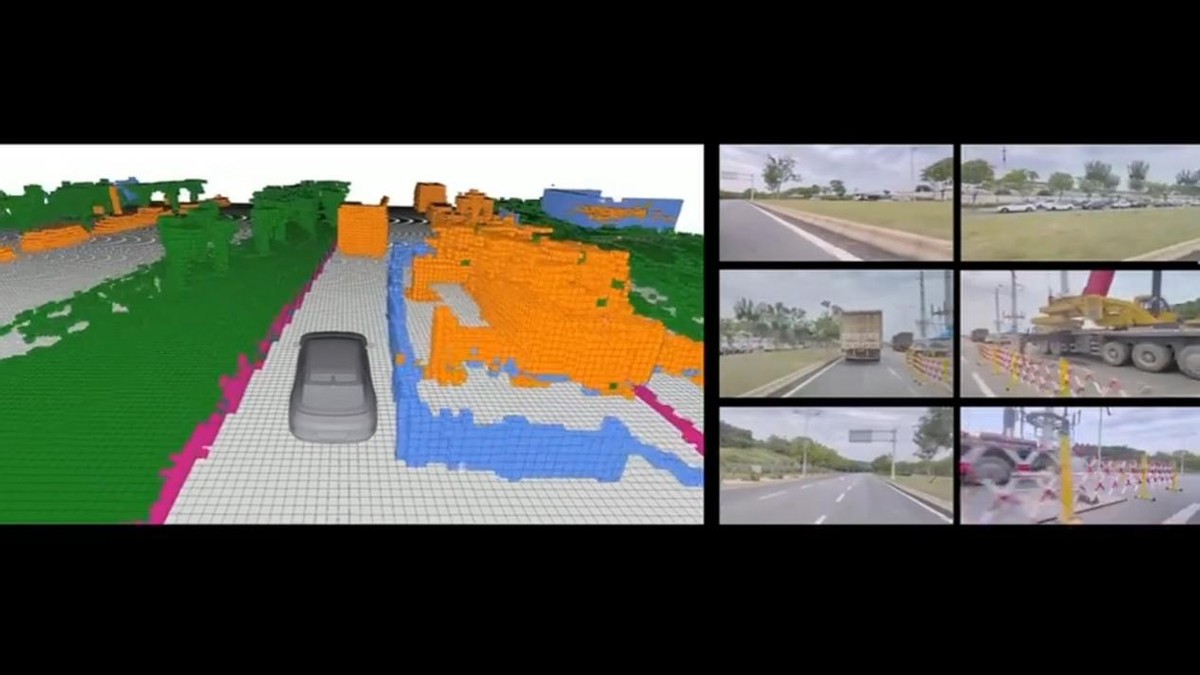
也正是因为这样的能力,所以OCC技术可以去追求去白名单化,换句话说就是可以尽可能多的去识别各种各样的障碍物,包括未知的物体形状和类别。
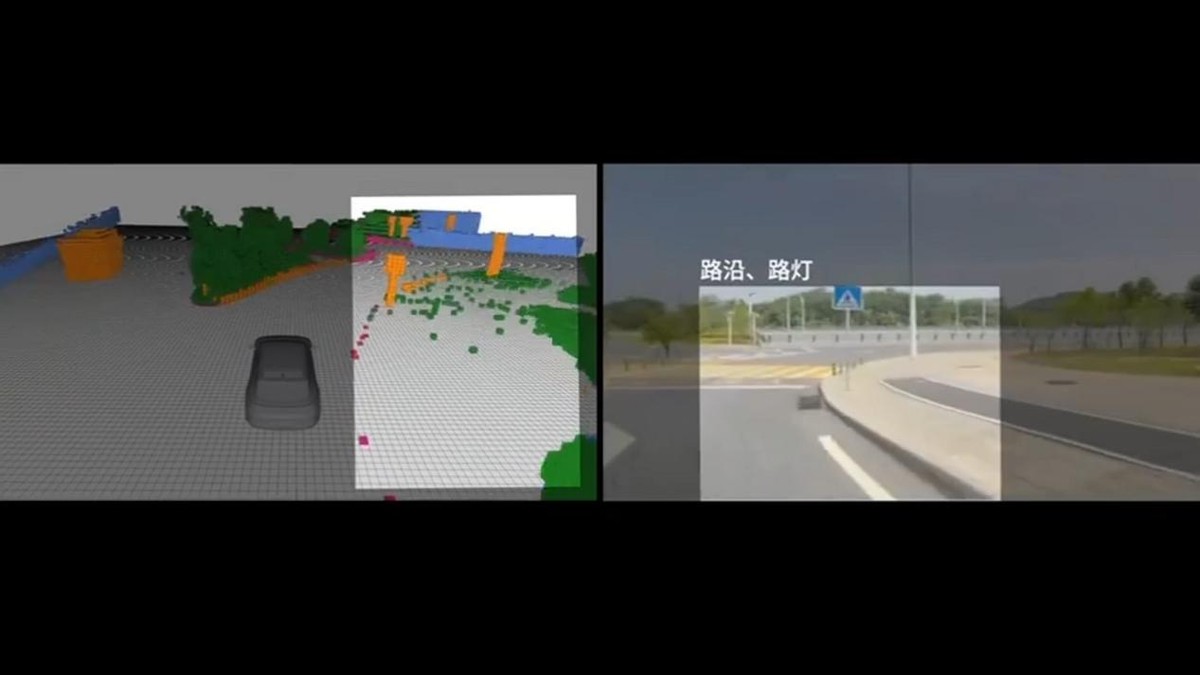
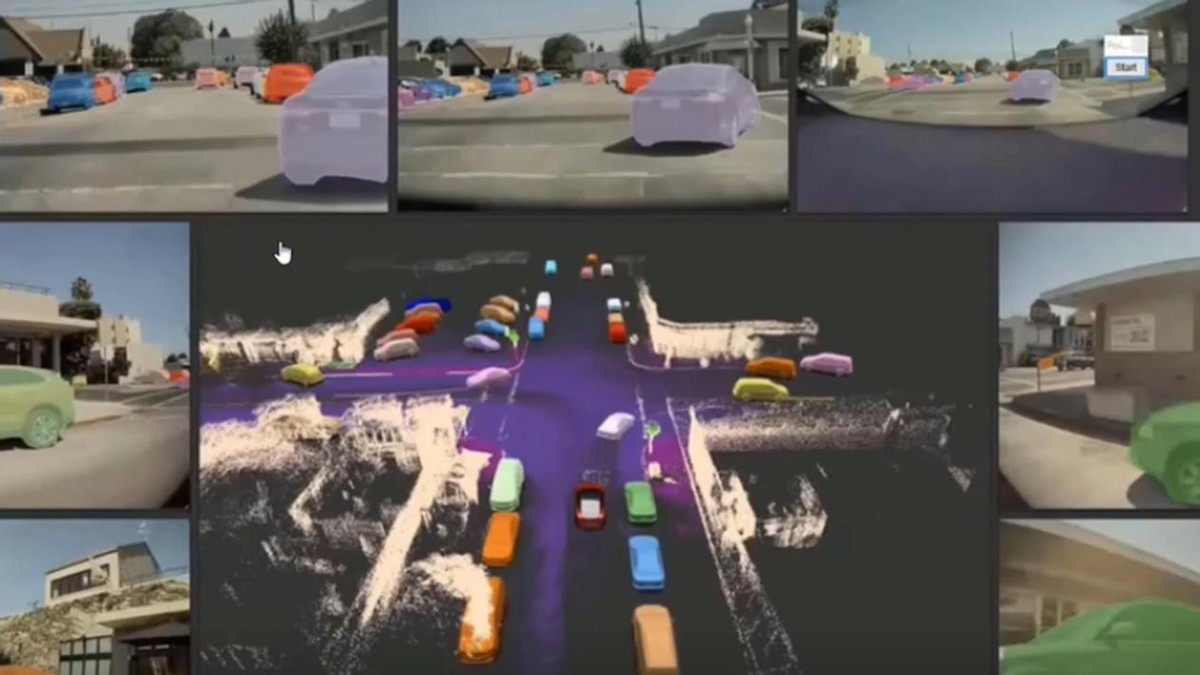
咱们可以再举个例子,OCC可以不依赖于特定场景的标注数据,它通过学习大量的空间数据,OCC占用网络可以建立一个通用的空间理解模型,这个模型能够对新的、未见过的场景进行有效的3D重建和障碍物检测。
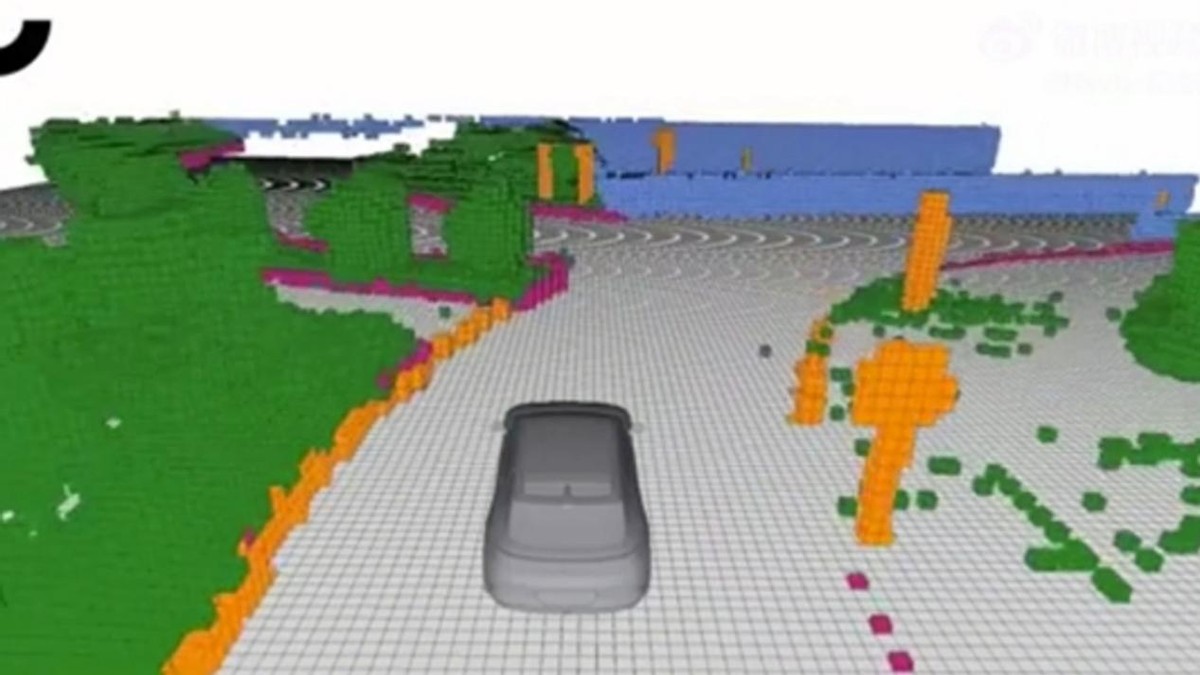

它可以不用提前学习而在第一次遇到的时候就能识别这是障碍物,它可以无感老练的去主动避障,它还可以让车辆远离路肩、水马、绿化带等常见障碍从而留出更多的安全距离,定量来讲的话,是偏离原本中心线cm左右。

打个比方,在没有智驾系统的时候,人类驾驶员避障除了用眼睛“看”之外,主要靠“猜”,但B.O.T三向箔却可以精准地对物体进行感知。
其次,纯视觉方案依赖高精地图,而在实际用车环境下,高精地图和实际路况有可能会不一致,例如那些突发的事故场景、施工场景或者恶劣天气带来的非常规路况等,这个时候B.O.T 三向箔就可以主动进行绕行、减速或者刹停动作。
从技术上来说,纯视觉方案的原理似乎并没有那么复杂,但它对高清摄像头感知能力、计算机视觉算法、大数据积累等都有更高的要求。

到目前为止,百度的Apollo技术生态已经积累了超过6000万公里的高质量Robotaxi原始数据,特别强大,同时还得到了百度170亿参数的AI视觉大模型的加持,可以实现模型的每周快速迭代。

极越01的3D精度可以做到厘米级,对于运动障碍物的识别精度也能达到0.1米/秒的误差范围,这样的表现,已经可以比肩激光雷达多传感器融合感知方案。

老板们之间惺惺相惜,那么消费者该如何选择呢?我们首先要弄清楚,纯视觉方案和激光雷达方案,有哪些不同的地方?


它的优势在于消费者的购车成本更低,因为它不需要那么昂贵的激光雷达感知系统;但它也存在一定的短板,比如感知距离比较有限,比如深度信息检测不足;除此之外,它对计算机算法的要求也比较高,相当于它要求驾驶员的大脑必须非常聪明而且一直高度集中。

其中的重点之一便是引入了激光雷达,可以辅助快速的构建环境的3D模型,举个例子,针对激光雷达扫描到的物体,它可以先计算出远近,相当于眼睛看到的物体直接就带有远近距离的信。
联系人:石经理
手 机:18106121178(微信同号)
Q Q:460917578
邮 箱:18106121175@www.huidadr.com
官 网:www.huidadr.com