杏彩体育·(中国)官方网站主营:激光打标机机、激光焊接机、激光切割机、激光清洗机等 咨询热线:18106121178

 全国服务热线:
全国服务热线:
18106121178
全国服务热线:
18106121178
近两年,自动驾驶成为国内数据标注领域的热门场景,不同传感器、不同车型、不同特殊情况的数据标注需求源源不断,将 3D 点云标注赛道推向了蓝海。同时伴随着自动驾驶等级提升,激光雷达、摄像头、4D 成像雷达等传感器的规模化应用,以及高速路、城市快速路、停车场等应用场景的不断丰富,自动驾驶数据标注的量级呈指数型上升。
近两年,自动驾驶成为国内数据标注领域的热门场景,不同传感器、不同车型、不同特殊情况的数据标注需求源源不断,将 3D 点云标注赛道推向了蓝海。同时伴随着自动驾驶等级提升,激光雷达、摄像头、4D 成像雷达等传感器的规模化应用,以及高速路、城市快速路、停车场等应用场景的不断丰富,自动驾驶数据标注的量级呈指数型上升。
为了实现更安全、智能的自动驾驶汽车,需要高质量的数据来训练和验证自动驾驶系统。标贝科技基于大模型自动化能力,又推出新工具 4D-BEV 标注,支持处理上亿像素点云数量,帮助快速准确的感知和理解车辆环境信息,增强自动驾驶系统的可靠性和安全性,从而实现更广泛的应用。
在自动驾驶领域,4D-BEV 标注是指在 3D 空间中以时间作为第四个维度进行标注的过程。通过精准地跟踪和记录动态对象的运动轨迹、姿势变化以及速度等信息,全面理解和分析动态对象在连续的时间序列中的变化,提升自动驾驶系统的感知、决策和控制能力。
BEV 全称是 Birds Eye View(鸟瞰视角),实现方法是把原本摄像头 2D 的视角通过算法校正和改变,形成基于上帝视角的俯视图。
目前,在自动驾驶领域中让感知模型学习强大的 4D-BEV 标注已经是大势所趋,用于训练和改进自动驾驶系统,进一步提高模型的准确性。
当下实现 4D BEV 感知的挑战主要有两个:其一是如何快速低成本的构建大量高质量的 4D-BEV 真值数据,用于感知的训练和评价;其二是如何有效利用云端来做大规模的 BEV 算法的训练、加速、部署、评价等。为了解决这些行业痛点,标贝科技在大模型能力支持下给出了 4D-BEV 标注方案。
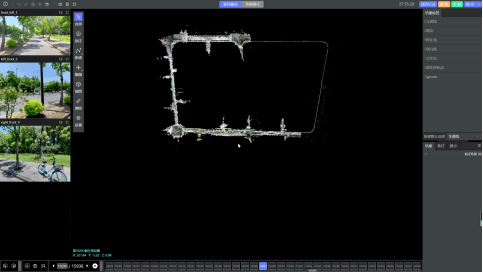
标贝科技 4D 标注工具针对 3D 空间+时序维度进行标注,采用了多种传感器融合的方式,可以支持激光雷达、摄像头、毫米波雷达、机位图等多种数据类型,并通过算法将这些数据进行对齐和融合,以提供更准确、更统一的视图。同时借助自动化技术和云端大数据来提升标注的效率和准确度。
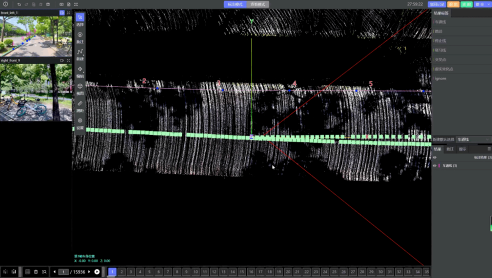
目前标注平台普遍性能在支持百万量级点云,标贝科技 4D-BEV 工具可以支持 1 亿以上的点云数量,点云文件大小达到 2GB+,及 2 万帧以上机位图加载,且实现了不同时序下对应的不同机位图切换。
4D 数据中,由于亿级的点云数量,在点云空间与机位图互相映射时,会带来性能难题,以及标注过程中对于点云及标注坐标点的吸附也会出现性能问题。标贝科技自主研发的 4D 工具通过深度优化和实际检测,在普通 8G 内存的电脑上也可以实现流畅的标注操作。
标贝科技 4D-BEV 标注可以处理时间序列数据,即将不同时间点的数据进行融合重建,在不同时序下,展示对应的机位图。
为了提高标注效率和准确性,标贝科技 4D-BEV 工具加入了机器视觉算法以自动完成复杂的标注工作,对于车道线,路沿,停止线等,都可做到高质量识别。
总的来说,标贝科技 4D-BEV 标注工具通过将静态和动态感知任务结合在一起,对车辆、行人和路标等目标进行多视角、多时序的标注,提供更加精准的目标位置、速度、姿态和行为等信息。同时还可以提供场景中不同目标的交互信息,帮助自动驾驶系统更好地理解道路上的交通情况,从而进行更加精准的决策和控制。
标贝科技产品负责人表示,4D-BEV 标注方案的推出,将为自动驾驶技术的发展打开新的视角,可以应用到车辆行为建模、道路条件识别、驾驶决策改进、仿真和测试等方面,提高自动驾驶的安全性和可靠性。未来,随着自动驾驶技术的不断发展,相信我们的 4D-BEV 标注方案将在推动自动驾驶行业的发展中发挥更大的作用。
公司地址:北京市朝阳区酒仙桥路4号751 D·Park正东集团院内 C8座105室 极客公园
联系人:石经理
手 机:18106121178(微信同号)
Q Q:460917578
邮 箱:18106121175@www.huidadr.com
官 网:www.huidadr.com