杏彩体育·(中国)官方网站主营:激光打标机机、激光焊接机、激光切割机、激光清洗机等 咨询热线:18106121178

 全国服务热线:
全国服务热线:
18106121178
全国服务热线:
18106121178
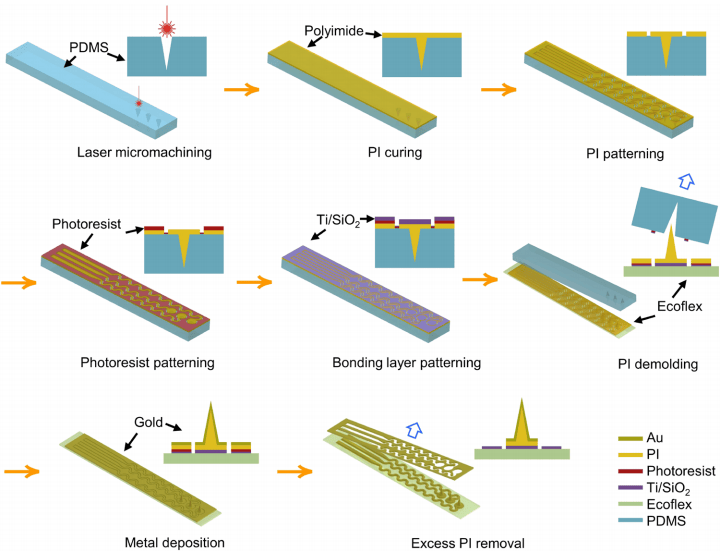
课题组采用激光刻蚀技术、微加工技术和转印技术,提出一种混合制造方案,借此造出了这款微针电极阵列。
期间,他们将同一个微针阵列中的不同长度的微针电极,插入不同位置和不同深度的肌肉群,借此测量出不同肌肉组在海蛞蝓运动过程中的肌电信号。
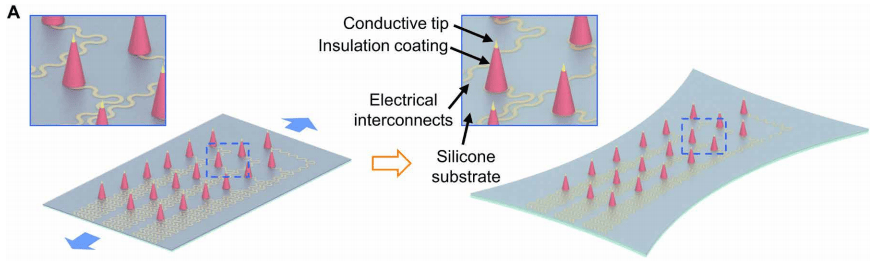
虽然这只是在软体动物海蛞蝓肌肉中的一次应用,但是它预式着这种可拉伸微针电极阵列,能被打造成一种生物-电子界面,从而成为检测生物体活动深层组织的有效工具。
尤其是对于柔软、可变形的生物组织来说,由这种微针电极阵列打造的三维生物-电子界面,能够确保电极与活动中的生物组织的紧密贴合。
从而能在脑机接口的电生理传感、皮肤间质液的电化学传感、以及神经和肌肉的电刺激上产生潜在应用。

对于软体动物如何利用肌肉来产生运动,比如章鱼的触手如何伸长和弯曲、海蛞蝓如何爬行和进食等,课题组非常感兴趣。
不少软体动物拥有十分特别的肌肉结构。比如,章鱼的触手包含着纵向、横向和环向的肌肉,海蛞蝓的口腔颊部肌肉包含多层不同的肌肉纤维。
对于这些在三维空间内分布的多肌肉群来说,研究它们如何通过协同作用产生动作,对于生物、仿生和机器人领域具有重要意义。
原因在于:这些肌肉群分布在厘米甚至毫米尺度的三维空间里。同时,肌肉群在不断经历大幅度的变形。
目前,微针电极阵列已在很多领域得到应用。比如,商业化的微针神经探针已被用于脑机接口,亦有商业化的皮下微针贴片已被用于肌电传感和电化学传感。
其一,绝大多数微针电极阵列不可拉伸,少数微针电极阵列具有拉伸性,但是性能十分有限,同时不具备单独寻址的能力。
其二,此前很难造出可定制化的微针电极阵列,比如让一个阵列包含不同长度的微针,从而能够测量不同深度的组织。
其三,无法便捷、精确地控制微针电极阵列的暴露区域,从而实现局部的信号采集,面对不同尺寸的微针电极阵列更是难以实现。

同时,他们发明了一种利用水凝胶开展三维刻蚀的新方法,能在几秒内实现对于微针的选择性刻蚀,从而让电极只在针尖区域保持导电状态。
赵航波表示:“这对于实现局部传感十分有必要。因此已有方法要么无法实现对于不同尺寸电极的检测区域控制,要么制造工艺十分繁琐缓慢。”
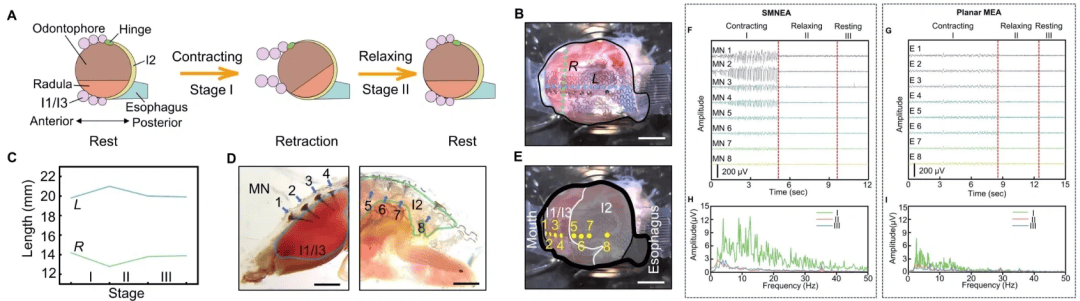
通过合作,他们首次测量出海蛞蝓在运动中的多个肌肉群的肌电信号时序图谱,借此解释了肌肉群的协同合作原理。
尽管他们从海蛞蝓离体组织上顺利测量到信号,但是在动物实验过程中,课题组经常遇到各种意想不到的困难。
“论文第一作者、课题组的博士生赵其耐在这个看似简单的动物实验上耗费了很多心血,很多次都是亲自去伊利诺伊大学与合作者共同做实验。”赵航波表示。
同时,他们还在探索如何将微针电极阵列与传感器、光学、光电子学和微流体学等结合,以用于光导辅助光学治疗、光遗传学和靶向药物输送等。
联系人:石经理
手 机:18106121178(微信同号)
Q Q:460917578
邮 箱:18106121175@www.huidadr.com
官 网:www.huidadr.com